How Does a Split Ring Commutator Reverse Current?
Table of Contents
1. The 15-second answer
A split ring commutator is just a segmented copper ring, each segment wired to one end of an armature coil and rotating with the rotor. Two carbon brushes stay fixed in space and sit 180° apart. The DC supply is on the brushes.
As the rotor turns:
- Each brush rides on one segment.
- After half a revolution, each brush naturally moves onto the other segment.
- So each end of the coil swaps which brush (and therefore which supply polarity) it’s tied to.
- The current in that coil reverses.
- At the same time, each side of the coil has moved into the opposite magnetic pole, so the torque keeps pointing in the same mechanical direction.
On paper this is “commutation”: periodic, angle-locked reversal of current between the rotor winding and the external DC circuit.
Everything else is detail. Useful detail, but still detail.
2. Who’s on which segment? A simple position map
To keep the idea concrete, imagine the classic school-lab DC motor: one rectangular coil, two commutator segments (A and B), two brushes (left = Brush L, right = Brush R), DC supply + on left brush, − on right. North pole at the top, south at the bottom.
We’ll track one full turn:
| Rotor angle (mechanical) | Which segment under Brush L | Which segment under Brush R | Current in coil (viewed left → right) | Main torque direction on coil |
|---|---|---|---|---|
| ~0° (coil horizontal) | A | B | Left → right | Clockwise |
| ~90° (coil vertical, in neutral zone) | A & B (brush spans gap, shorted pair) | A & B | Reversing; momentary short, small net torque | Coil coasts on inertia |
| ~180° (coil horizontal, flipped) | B | A | Right → left | Still clockwise |
| ~270° (vertical again) | A & B | A & B | Reversing again | Coasts |
| Back to ~360° / 0° | A | B | Left → right again | Clockwise |
Key points hiding in that small table:
- The coil ends don’t move relative to the commutator segments, they are soldered there.
- The brushes don’t move relative to the stator.
- All the “magic” is just the segments moving under the stationary brushes so that the wiring permutation changes every half-turn.
Because the coil is also moving through the field, “current reversed in the coil” does not mean “torque reversed”. Directions swap in pairs, so the mechanical output stays one-way.
3. What actually happens during current reversal
The neat exam diagram shows a clean flip at exactly 90° or 180°. Real machines cheat a bit.
Practical commutation includes three important facts:
- There is always a short-circuit interval
- Each brush is wider than one segment and usually spans about 2–3 segments.
- While a coil is passing through the neutral zone, its two commutator segments are shorted together by the brush.
- During this short period (“commutation period”), the current in that coil is supposed to go from +I to −I.
- The coil is inductive
- The armature coil has inductance, so it resists changes in current.
- If the current is still trying to flow in the old direction while the segment has already swapped to the other brush, you get sparking and heating at the contact.
- Field distortion moves the ideal switching point
- Armature reaction and load move the magnetic neutral axis (MNA).
- The theoretically “nice” 90° brush position is almost never the real operating position. The sweet spot is where the induced voltage in the commutating coil is as close to zero as you can manage.
Designers call the zone around that sweet spot the commutating plane and work hard to keep the reversal inside it with minimal energy in the coil.
4. Why bother splitting the ring at all? (Slip ring vs split ring)
If you replaced the split ring with two solid slip rings, each permanently tied to one end of the coil, you’d still get voltage induced in the armature. But you’d also get these effects:
- Current in the rotor would not reverse relative to the external supply every half turn.
- The forces on the two sides of the coil would flip direction after 180°.
- Torque would reverse. The rotor would tend to rock or stall instead of giving continuous rotation in one direction.
That’s great behavior for an AC generator (you want alternating output; slip rings are fine there). For a brushed DC motor or DC generator feeding a DC load, it is not.
So in short:
- Slip ring → keeps polarity as-is through rotation; used where the rotating side already expects AC or doesn’t care.
- Split ring commutator → flips the connection of each coil to the external circuit on a strict schedule, so the external side sees DC and the rotor sees the alternating current it needs for unidirectional torque.
Same copper. Very different behavior.
5. Real-world current reversal is never perfectly clean
If you design or buy commutators for industrial machines, the interesting questions are rarely “what is a commutator” anymore. They look more like:
- How much sparking can we tolerate at rated load?
- What commutation margin do we have at overload?
- At what speed does the current reversal window become too short?
A few practical aspects that matter a lot once you scale up:
- Commutation time
- Time available for reversal = brush width in mechanical radians ÷ rotor surface speed.
- Higher speed or narrower brushes → less time for the current to reverse.
- Interpoles and compensating windings
- Interpoles sit between main poles and are wired in series with the armature.
- They inject a local field that cancels the armature reaction in the commutating coil, helping the current cross through zero during the short-circuit interval without a big induced voltage fighting it.
- Result: you get closer to “ideal” current reversal at the brush, with less sparking.
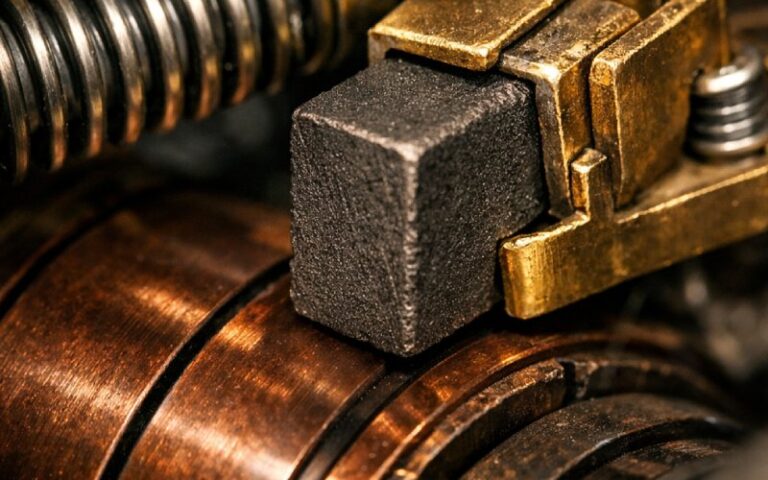
- Brush material and contact resistance
- Carbon / graphite brushes add a little resistance at the contact.
- That resistance softens the current change and dampens the energy in the short-circuited coil, which makes the reversal behave better.
- Segment geometry and insulation
- Segmented copper bars insulated by mica or engineered plastics are standard.
- Undercutting the mica and shaping the segment edges influences how the brush enters and leaves each segment, so it touches both segments for just long enough to let the current reverse without a big jump.
All of these knobs exist to support exactly one simple goal: when the coil passes the brush axis, the current must change sign with as little drama as possible.
6. Design and sourcing notes for B2B buyers
If you’re specifying commutators or motors instead of solving homework, you care about how that current reversal translates into cost, life, and risk.
Some points to keep in the spec sheet and RFQ emails:
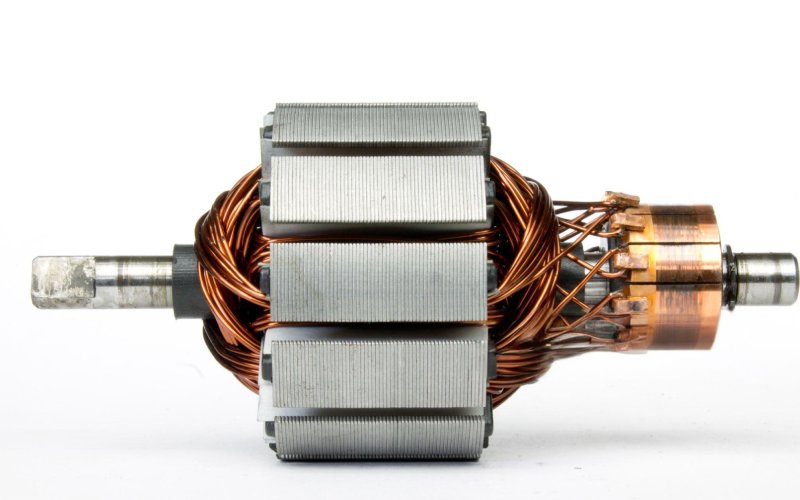
- Number of segments
- More segments → more coils → smoother torque and gentler current steps per coil.
- Industrial DC motors may have dozens or hundreds of segments; small tools only a few.
- Segment material and build
- Hard-drawn copper segments, insulated with mica or equivalent high-temperature material, are standard in serious DC machines.
- Check rated surface speed, spin test data, and allowable brush pressure.
- Brush arrangement
- Ask about brush grade, expected brush drop (voltage loss at the contact), and recommended current density.
- For bid comparisons, normalize expected brush life in hours at your load profile, not just at nameplate.
- Commutation aids
- For larger DC motors: are interpoles and compensating windings present, or is the design relying purely on brush shift and carbon resistance?
- Service access
- How easy is it to skim or undercut the commutator in the field?
- Is there enough copper above the mica to allow several resurfacings?
When you read “sparkless commutation” on a datasheet, translate that to: “Under our test conditions, current reversal at the brushes stayed within safe voltage and temperature limits.”

7. Failure patterns that point back to poor current reversal
Common field symptoms that are really commutation problems in disguise:
- Heavy sparking or visible rings of fire at the brushes
- Often means the coil current hasn’t finished reversing by the time the brush leaves the segment.
- Can be caused by wrong brush position, incorrect brush grade, damaged interpoles, or overload.
- Pitted or “barber-pole” commutator segments
- Arcing during reversal erodes the copper.
- The pattern can tell you if one pole or one brush arm is misaligned.
- Uneven brush wear and overheating
- If reversal is late on one side, that brush does more of the switching work and runs hotter.
- EMI and noisy nearby electronics
- Fast, arcing reversals spray broadband noise onto cables and into space.
- Smooth commutation is not just a mechanical issue; it’s also a compliance issue when you ship into regulated markets.
Every one of those patterns is ultimately a sign that “how the split ring commutator reverses current” in that machine is not matching the assumptions used in its design.
8. FAQ: split ring commutators and current reversal
1. How does a split ring commutator reverse current in a simple DC motor?
Short version:
Each end of the armature coil is connected to a different commutator segment.
The brushes are connected to the DC supply and stay fixed.
As the rotor turns half a revolution, each brush moves from one segment to the other.
That swap reverses which coil end sees “+” and which sees “−”.
Coil current reverses direction, while the coil sides have also swapped magnet poles, so the torque keeps its sign.
That’s the whole trick.
2. Is a split ring commutator only used in DC motors?
No. The same structure is used in classic DC generators and dynamos as a mechanical rectifier.
In a generator, the winding voltage is naturally alternating as the rotor turns through the field.
The commutator flips the connections so that the external terminals see current in one direction only (DC).
So the device is the same; the role changes depending on whether you feed electrical power in (motor) or take it out (generator).
3. What makes a “good” current reversal at the commutator?
Engineers usually mean something like:
Current in the short-circuited coil goes from +I to −I during the brush contact window.
The induced voltages during that change are low enough that sparking is minimal or absent.
Temperature rise at brushes and segments stays inside design limits over the full load range.
Achieving that involves the interplay of brush width, segment geometry, brush material, armature inductance, interpoles, and actual operating speed.
4. Why not always reverse current electronically instead of using a split ring commutator?
Modern brushless DC motors do exactly that: they use position sensors and power electronics to handle commutation with no mechanical contact.
But:
You need control electronics, position feedback, and a different winding layout.
For many low- to mid-power applications, a simple brushed DC motor with a split ring commutator is cheaper and easier to drive (plain DC supply).
In legacy systems, the mechanical commutator is deeply integrated into the overall design.
So the choice is mostly economic and architectural, not theoretical.
5. What happens to current reversal if I replace a split ring commutator with slip rings?
You would no longer get built-in reversal of rotor current every half turn:
The rotor coil would see a fixed polarity DC supply through the slip rings.
As the coil moves from under one pole to the other, the torque direction would change sign.
The motor would tend to oscillate around a position rather than spin steadily.
To get the same behavior as a split ring commutator, you’d then need external electronics to reverse the current in sync with rotor position, sliding you into brushless territory.
6. Which technical details should I send a commutator or motor supplier if I care about commutation quality?
A practical list:
Rated and peak armature current
DC voltage range and any ripple / PWM information
Rated speed range and duty cycle
Expected overload conditions (duration, % overcurrent)
Ambient temperature range and cooling method
Any EMC requirements related to brush arcing
Those numbers tell the supplier how aggressive the current reversal will be and what design features they need (segments, brushes, interpoles) to deal with it.
7. How can I quickly check on the bench that the split ring commutator is actually reversing current?
A simple method for a small motor:
Run the motor at low DC voltage.
Mark one side of the armature coil and the corresponding commutator bars.
Use a tiny series resistor in the supply and an oscilloscope across it.
You’ll see the armature current ripple twice per revolution as different coils undergo commutation.
If you instrument an individual coil (on a dedicated test rig), you can watch its current waveform crossing through zero as the commutator swaps the connections.
9. Key points to carry into your next project
- A split ring commutator reverses current because the brush contact walks from one segment to the other as the rotor turns.
- That reversal is timed so each coil flips polarity as it crosses the neutral axis, while its physical sides also swap magnets, keeping torque one-way.
- Real machines care less about the ideal diagram and more about how cleanly this happens under load, speed, and temperature.
- When you specify or select DC motors and commutators, you’re really buying controlled, repeatable current reversal at a sliding copper-carbon interface.
Once you see it that way, datasheet numbers about brushes, segments, interpoles and duty cycle stop being fine print and start looking like what they are: clues about how the current is going to reverse when the system is doing real work.