Commutator Motors vs. Induction Motors in Industrial Applications
In our factory work, this comparison rarely starts as a theory question. It usually starts during a shutdown. A plant has a drive section that no longer behaves well at startup, or the commutator surface is wearing too fast, or the line wants tighter speed control without inheriting a new maintenance problem. That is where the real choice appears: stay with a commutator motor, or move to an induction motor system.
The mistake is to reduce the discussion to “old versus new.” That misses the application. A commutator motor can still be the correct answer when the process lives or dies on breakaway torque, low-speed pull, reversing duty, or legacy DC architecture that cannot be replaced cheaply in one shutdown window. An induction motor usually wins when the plant needs long-duty stability, fewer wear items in the current path, and a cleaner maintenance routine.
We build and support commutator components, so we do not look at this as a catalog comparison. We look at failure modes. What actually stops production. What can be inspected early. What gets ignored until the machine flashes over, or the bearings start to pit, or the retrofit budget doubles because one “simple motor swap” was never simple.
Table of Contents
Where Commutator Motors Still Make Sense
A commutator motor still earns its place when the load asks for direct torque response from zero or near-zero speed, frequent starts, repeated reversing, or behavior that operators already know and trust in an older drive train. In these jobs, the motor is not just turning a shaft. It is part of the process feel. Tension sections, hoists, indexing units, draw stands, some rebuild-heavy legacy lines. That kind of work.
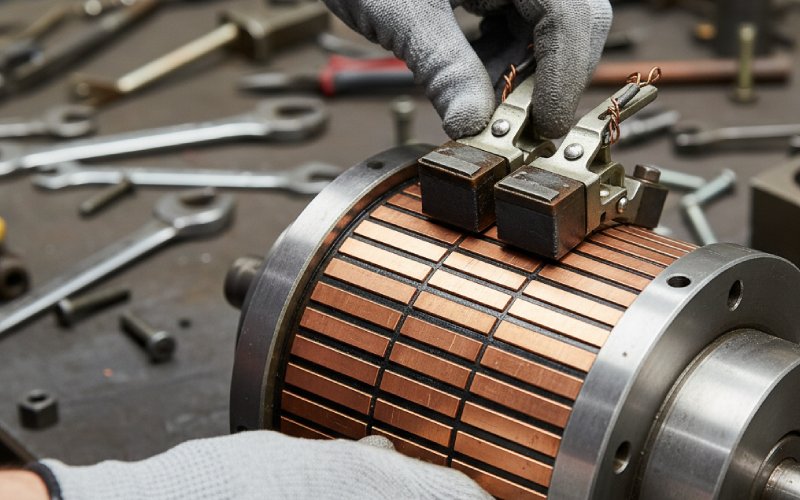
But the price of that control is not “maintenance” in the abstract. It is very specific maintenance. The brush has to form and preserve the right interface on the commutator surface. A healthy system can show light, non-destructive sparking and still run correctly. A bad system moves into heating, surface damage, unstable commutation, and then larger trouble. We pay close attention to film condition, spring consistency, seating quality, vibration, humidity, abrasives, and contamination because those variables decide whether a commutator runs quietly for a long interval or starts eating itself.
This is where many plants lose money. They treat brush replacement like a normal consumable swap. It is not always that. In our rebuild and supply work, repeated commutator damage often traces back to one of three things: brush pressure treated as a rough setting instead of a controlled value, brush seating done in a hurry, or contamination left on the machine after service. Those are ordinary mistakes. They are also expensive ones.
If your equipment is already showing uneven brush wear, unstable film, bar-edge burning, or repeated shutdowns related to brush gear, start with the component side before forcing a full conversion. Our team can review dimensions, duty cycle, and wear pattern for custom commutator assemblies or matching carbon brush grades.
Why Induction Motors Usually Take the General-Duty Work
For mainstream plant service, induction motors usually close the job more cleanly. The standard squirrel-cage machine remains common in industry because the layout is simple, rugged, and easier to keep in service over long runs. Startup methods are also well understood, from direct-on-line to soft starters to VFD control. Direct-on-line starting gives the highest starting torque, but it also puts the highest demand on the electrical system. During startup, induction motor current can be several times rated current, so the system choice matters just as much as the motor choice.
The older argument for commutator motors was often speed control. That gap is smaller now. With a properly selected drive, an induction motor can operate in the constant-flux range below nominal frequency and then move into field weakening above nominal speed, where operation shifts into a constant-power region. So yes, many applications that once stayed with commutator machines can now move to induction motors without giving up practical control. Not all. Many.
Still, “lower maintenance” should not be read as “no risk.” On VFD-fed induction systems, the risk moves. Common-mode voltage and high-frequency switching can drive current through the bearings. When that happens repeatedly, the lubricant and raceways take the damage. If a retrofit ignores grounding, cable symmetry, output filtering, or bearing protection, the plant may trade brush problems for bearing problems. Different fault. Same shutdown.
The Part Most Comparisons Miss
The first missed issue is contamination.
On commutator machines, contamination changes everything faster than most maintenance schedules assume. Oil residue attracts dust. Dust packs into slots. Metal dust is worse than carbon dust when flashover risk starts building. So when we evaluate a commutator application, we do not just ask about electrical load. We ask what is floating in the air, what settles during idle time, and what cleaning method the site actually uses. These are not side questions. They decide service life.
The second missed issue is service access.
A commutator motor may be fully workable on paper, but if the machine is buried in a section where no one can inspect spring condition, track surface changes, or clean the unit without a major stop, the ownership math changes. In our factory-side judgment, a motor type that needs disciplined inspection should not be placed where disciplined inspection is unlikely.
The third missed issue is overhauling or reversing duty.
This is where a lot of clean-looking spreadsheets break down. A process that drives back into the motor during lowering, braking, or reversal does not behave like a fan or a pump. It loads the electrical system and the mechanical train differently. It also exposes weak commutation setup very quickly on brushed equipment, and weak drive design very quickly on AC retrofits. That is why we usually ask for the full duty story before we quote either a replacement commutator or a conversion path.
Need a quick application check? If your motor sees frequent reversing, low-speed heavy load, or repeated commutator wear, send us the motor data, operating current, speed range, and existing commutator dimensions. We can review whether the better path is rebuild, replacement, or AC conversion.
Commutator Motor vs. Induction Motor: Practical Selection Table
| Decision factor | Commutator motor | Induction motor | How we judge it in factory practice |
|---|---|---|---|
| Breakaway torque from standstill | Usually strong and direct | Depends on motor design and drive strategy | If zero-speed pull is central to the process, commutator still deserves a hard look |
| Low-speed behavior | Immediate and familiar in legacy DC systems | Often good with a well-matched VFD | Induction is often enough now, but not in every hoist or tension duty |
| Long continuous service | Serviceable, but brush gear becomes part of routine | Usually the cleaner choice | For 24/7 utility-style duty, we lean induction |
| Wear items in current path | Brushes and commutator surface need monitoring | No brush-commutator contact in squirrel-cage designs | Induction usually reduces routine contact-surface work |
| Dust, oil vapor, metal fines | Higher risk for unstable commutation and flashover | More tolerant, though bearings and cooling still matter | Dirty environments often push the answer toward induction |
| Reversing and overload duty | Can perform very well if correctly set up | Often handled well with modern drives | Application detail matters more than motor label here |
| Retrofit simplicity in old DC lines | Often faster if the rest of the system stays in place | May require wider control and mechanical changes | Short shutdowns often favor staying with commutator hardware |
| Main hidden risk | Film instability, poor seating, uneven spring force, contamination | Bearing currents, grounding errors, cable and filter mismatch | Wrong support design creates the real cost, not the motor alone |
| Best fit | Process-led, torque-sensitive, legacy-heavy duty | General-duty, uptime-focused industrial service | Start with failure mode, not purchase price |
The point is not that one motor is better in every case. It is that each one asks the plant to manage a different kind of risk. We manufacture commutator parts, so we say this plainly: if the site will not maintain the brush-commutator system correctly, then a commutator motor becomes a bad bargain even when its torque behavior is attractive. And just as plainly, if the process truly depends on the way that commutated drive responds at low speed, an induction retrofit can look cheaper on paper and still disappoint in service.
How We Usually Advise Industrial Buyers
We normally start with five checks.
1. What happens at zero speed or near zero speed? If the line needs immediate pull without hesitation, that matters more than broad statements about “modernization.”
2. What is in the air? Dust type, oil mist, metal fines, moisture swings. On commutator systems, these are not background details.
3. How often can the motor actually be inspected? Not scheduled. Actually inspected.
4. Is this a replacement, a rebuild, or a conversion? Those are three different jobs with three different budgets.
5. Which failure mode is easier for your site to manage? Brush and surface discipline, or VFD and bearing discipline. There is no neutral answer here.
When the job stays with a commutator motor, we usually move quickly into component questions: commutator dimensions, mica condition, bar surface history, brush grade, holder condition, spring-force consistency, and whether the machine has seen past flashover events. When the job moves toward conversion, we want the real speed range, torque requirement, load inertia, cable path, grounding arrangement, and bearing protection plan before anyone says “equivalent replacement.”
A Better Commercial Question
The better commercial question is not “Which motor is superior?” It is this:
Which solution fits the duty, the shutdown window, and the maintenance habits of the plant without creating a new weak point?
That is the question we use in our own engineering work. It keeps the project honest. It also keeps buyers away from two bad outcomes: preserving an old commutator system that the site will never maintain correctly, or pushing an AC conversion into a process that still needs the torque behavior of a commutated machine.
Planning a retrofit or replacing worn commutator parts? We support industrial buyers with drawing-based customization, commutator production, replacement part matching, and application review for difficult duty. You can contact our engineering team with your drawings, existing motor data, photos of the worn surface, or key dimensions for a technical assessment.
FAQ
Are commutator motors obsolete in industrial applications?
No. Their use is narrower than before, but they still fit applications that depend on strong starting behavior, low-speed control feel, frequent reversing, or compatibility with legacy DC drive architecture. The issue is not age. The issue is whether the plant can maintain the brush-commutator system correctly.
Are induction motors always lower maintenance?
Usually lower maintenance in standard squirrel-cage service, yes. But not maintenance-free. Bearings, alignment, cooling, insulation condition, and drive-related bearing current all still matter, especially on VFD-fed systems.
What is the most common cause of repeat commutator trouble after service?
In our experience, it is rarely one dramatic fault. More often it is poor brush seating, inconsistent spring force, or contamination left in the machine after reassembly. Those problems do not always fail immediately. They build. Then the surface starts to tell the story.
Can an induction motor with a VFD replace a commutator motor?
In many cases, yes. Modern drives can give induction motors practical speed and torque control over a wide operating range. But the replacement decision still has to account for low-speed load, overload duty, grounding, cable practice, output filtering, and bearing protection. A power-rating match by itself is not enough.
Which motor type is better in dusty or oily environments?
In general, induction motors are more forgiving because they do not rely on a brush-commutator contact surface. On commutator machines, oil attracts dust, packed debris can build in critical areas, and metal dust is especially dangerous when flashover risk is already present.
When should a plant stay with a commutator motor instead of converting?
Usually when the process still depends on direct low-speed torque behavior, the shutdown window is tight, the surrounding controls are built around the existing architecture, and the maintenance team can manage brush gear properly. In those cases, a well-executed rebuild or replacement often makes more sense than a rushed conversion.
The right motor is not the one that sounds modern. It is the one whose weak points your plant can actually control.