Mechanischer Kommutator vs. sensorlose Kommutierung: Wie Sie die richtige Motor-Kommutierungsmethode wählen
Wir bauen Kommutatoren, So sehen wir diese Entscheidung von dem Teil aus, den die meisten Diskussionen auslassen. Nicht “welcher Motortyp ist der neuere”. Das ist nicht sinnvoll. Die eigentliche Frage ist, ob Ihr Projekt eine in den Rotor eingebaute Schaltfunktion benötigt oder ob es sich leisten kann, die Kommutierung in die Steuerung, die Leistungsstufe, die Startlogik und die damit verbundene Validierungsarbeit zu verlagern. Mechanische Kommutatoren sind immer noch sinnvoll, wenn direkter DC-Antrieb, einfaches Reversieren, niedrige Systemkosten und schnelle Produktionsübernahme wichtiger sind als maximaler Wirkungsgrad oder minimale Wartung. Bei bürstenlosen Antrieben entfällt die Schnittstelle zwischen Bürste und Kommutator, sie wird jedoch durch eine elektronische Kommutierung und einen anspruchsvolleren Steuerungskomplex ersetzt.
Deshalb behandeln wir bürstenbehaftete und bürstenlose Motoren nicht als Gut-gegen-Böse-Argument. In vielen Anwendungen kann beides funktionieren. Die richtige Antwort ergibt sich in der Regel aus dem Gesamtsystem: Elektronikbudget, Anlaufverhalten, Einschaltdauer, Wartungsintervall, akustische Zielvorgabe, verfügbare Entwicklungszeit und wie viele Schwankungen die Produktionslinie voraussichtlich ohne Drama verkraften kann.
Inhaltsverzeichnis
Was ändert sich, wenn ein Kunde von mechanischer zu sensorloser Kommutierung wechselt?
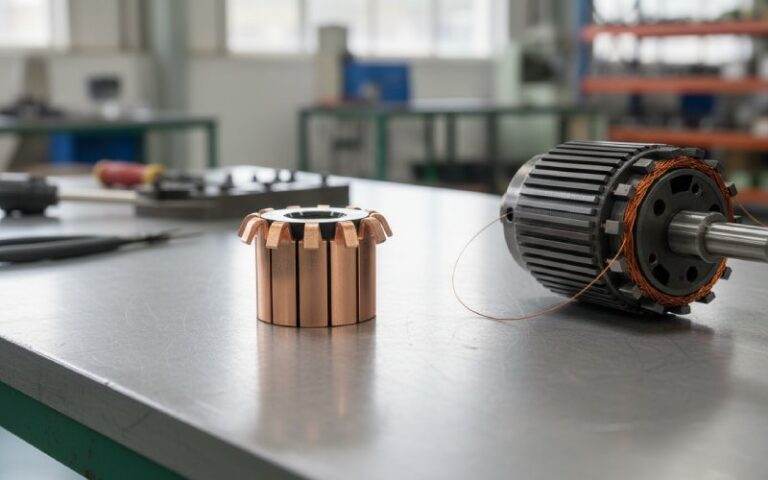
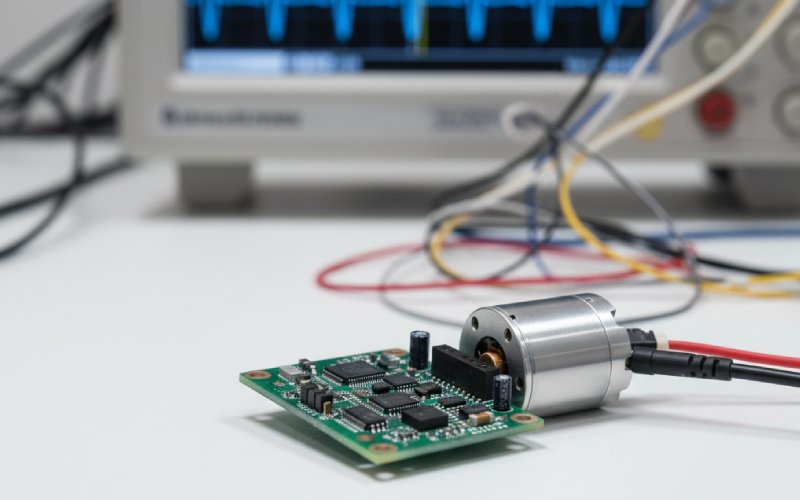
Ein mechanischer Kommutator führt das Schalten physikalisch durch. Die Bürsten berühren den Kommutator, der Strom wird in die Rotorspulen geleitet, das Drehmoment folgt. Beim sensorlosen BLDC entfällt dieser physische Schaltsatz. Der Motor muss natürlich immer noch kommutieren. Er tut dies nur elektronisch. Bei der üblichen sechsstufigen sensorlosen Steuerung werden zwei Phasen kommutiert, eine Phase bleibt unangetrieben, und der Regler beobachtet das Gegen-EMK-Verhalten dieser unangetriebenen Phase, um den nächsten Schaltzeitpunkt zu bestimmen. Im stationären Betrieb liegt der Kommutierungszeitpunkt typischerweise etwa 30 elektrische Grad nach dem Nulldurchgang.
Auf dem Papier sieht das aufgeräumt aus. In einem echten Produkt ist es nicht so aufgeräumt. Die schwebende Phase ist nur dann nützlich, wenn sie tatsächlich lesbar ist. Unmittelbar nach der Kommutierung können Schalttransienten und Freilaufstrom das Erfassungsfenster verfälschen. Referenzimplementierungen gehen damit um, indem sie den Punkt, an dem eine Gegen-EMK-Erkennung zulässig ist, verzögern, frühe Abtastungen auslassen, das Signal filtern oder den Abtastzeitpunkt in einen ruhigeren Teil des PWM-Zyklus verschieben. Die technische Arbeit verschwindet also nicht, wenn der Kommutator verschwindet. Sie verschiebt sich.
Es gibt einen weiteren praktischen Punkt. Im Stillstand gibt es keine nützliche Gegen-EMK zu messen. Ein sensorloser BLDC-Antrieb startet also nicht wirklich “sensorlos” bei Drehzahl Null, wie viele Käufer annehmen. Er benötigt in der Regel einen Ausrichtungsschritt, eine erzwungene Kommutierungsrampe oder eine Anfahr-Zustandsmaschine, bevor der Regler auf die Gegen-EMK-basierte Kommutierung umschalten kann. Diese Übergabe ist einer der Punkte, bei denen die Projektzeitpläne länger werden als erwartet.
Warum dies für einen Kommutator-Käufer wichtig ist
Ein Käufer, der mit der Aussage beginnt: “Brushless hat keinen Kommutator, also muss es besser sein”, betrachtet in der Regel nur eine Ebene des Systems. Manchmal ist diese Schlussfolgerung richtig. Manchmal führt sie zu neuer Arbeit in den Bereichen Steuerelektronik, EMV, Robustheit bei der Inbetriebnahme oder Softwarevalidierung, die mehr kostet als das mechanische Verschleißproblem, das man eigentlich beseitigen wollte. Bürstenmotoren sind für viele Programme nach wie vor attraktiv, weil die Kommutierung in den Motor integriert ist, die Steuerung so einfach sein kann wie eine angelegte Gleichspannung oder eine H-Brücke und die Architektur weniger externe Elemente erfordert.
Wir sehen dies häufig bei kostensensiblen Produkten und bei Programmen mit kurzen Validierungszeiträumen. Wenn die Anwendung nicht den Lebensdauer-Vorteil einer bürstenlosen Plattform benötigt und wenn die Geräuschentwicklung, der Verschleiß und die EMI eines bürstenbehafteten Systems bereits überschaubar sind, ist ein gut spezifizierter Kommutator oft der kürzere Weg zur Produktion. Nicht modischer. Nur kürzer.
Das Selektionsbild, das wir zu Beginn eines Projekts verwenden
Die folgende Tabelle ist kein Marketingvergleich. Sie ist das erste technische Bild.
| Zustand des Projekts | Mechanischer Kommutator ist in der Regel sinnvoller | Sensorlose Kommutierung ist in der Regel sinnvoller |
|---|---|---|
| Systemkostenobergrenze ist knapp bemessen | Ja. Die motorseitige Kommutierung reduziert die Komplexität der Steuerung. | Seltener. Die elektronische Kommutierung erfordert zusätzliche Hardware und Validierung. |
| Direktes Starten aus der Ruhelage | Gute Passform. Es ist keine Gegen-EMF-Erkennung erforderlich, um die Rotation zu starten. | Erfordert eine Startlogik, bevor man dem Back-EMF vertrauen kann. |
| Die Kontrollarchitektur muss einfach bleiben | Gute Passform. Eine Gleichstromversorgung oder eine einfache H-Brücke ist oft ausreichend. | Schwächere Passform. Leistungsstufe und Timing-Strategie sind aufwendiger. |
| Lange Wartungsintervalle sind entscheidend | Begrenzt durch Bürsten- und Kommutatorverschleiß. | Fester Sitz. Keine Schnittstelle zwischen Bürste und Kommutator. |
| Dauerbetrieb mit hoher Geschwindigkeit ist entscheidend | Möglich, aber Verschleiß und thermische Grenzen werden wichtiger. | Gute Passform. Bürstenlose Konstruktionen werden in der Regel für eine lange Lebensdauer bei höheren Geschwindigkeiten gewählt. |
| Sehr geringes elektrisches Rauschen und geringe Lichtbogenbildung sind erforderlich | Schwieriger. Bürstenkontakt und Lichtbogenbildung müssen sorgfältig gehandhabt werden. | Normalerweise besser. Kein Bürstenlichtbogen an der Kommutierungsschnittstelle. |
| Die Produktionstoleranz gegenüber elektronischen Abweichungen ist gering. | Gute Passform. Das mechanische System ist bei vielen Produkten mit geringer Komplexität leichter zu standardisieren. | Schwächere Passform. Anlauf-, Abtast- und Zeitspannen müssen in der Elektronik und Firmware eingehalten werden. |
Dieser Kompromiss ist bei allen gängigen Motoren gleich: bürstenbehaftete Modelle profitieren von einer einfacheren Steuerung und weniger externen Komponenten, während bürstenlose Modelle diese Einfachheit gegen eine längere Lebensdauer, höhere Drehzahlen und eine elektronisch gesteuerte Kommutierung eintauschen. Bei sensorlosen Varianten kommt noch eine weitere Bedingung hinzu: Das Anfahren und das Verhalten bei niedrigen Drehzahlen müssen bei der Entwicklung der Steuerung berücksichtigt werden, da die nutzbare Gegen-EMK ein stetig laufendes Signal und kein Stillstandssignal ist.
Wenn wir in der Regel empfehlen, einen mechanischen Kommutator zu verwenden
Wenn das Produkt einen geradlinigen Gleichstrombetrieb, eine einfache Richtungsumkehr und einen schnellen Produktionsanlauf erfordert, ist die mechanische Kommutierung immer noch eine sehr vernünftige Wahl. Die Schaltfunktion bleibt innerhalb des Motors. Das ist wichtig, wenn das Budget für die Steuerung klein ist, das Elektronikteam nicht versucht, eine Motorsteuerungsplattform von Grund auf zu entwickeln, oder das Projekt einfach nicht das Hauptrisiko in die Software-Steuerung verlagern will.
Sie bleibt auch eine praktische Wahl, wenn die Wartungsintervalle bekannt und akzeptiert sind. Bürstenverschleiß ist real. Kommutatorverschleiß ist real. Aber bekannter Verschleiß, mit bekannten Inspektionsintervallen und bekannten Austauschregeln, ist oft einfacher zu handhaben als eine Neukonstruktion der gesamten Antriebsarchitektur. Das gilt besonders für ausgereifte Produkte, bei denen die mechanische Hülle, die Stromversorgung und das Kostenmodell bereits feststehen.
Wenn sensorlos BLDC ist in der Regel die bessere Richtung
Wenn das Projekt eine längere Betriebsdauer ohne Bürstenwartung, eine anhaltend hohe Geschwindigkeit und geringere Verluste an der Kommutierungsschnittstelle erfordert, macht die bürstenlose Architektur mehr Sinn. Das ist der saubere Fall. Entfernt man das Kontaktpaar aus Bürste und Kommutator und verlegt die Wicklungen auf den Stator, ändert sich der Verschleißmechanismus. Das gilt auch für das thermische Verhalten. Das gilt auch für das Wartungsmodell.
Aber “sensorlos” ist kein kostenloses Extra. Er ist in der Regel nur dann der richtige Weg, wenn die Anwendung im Gegenzug für den Wegfall der Positionssensoren die Anlauflogik, die Mindestdrehzahlbeschränkungen, das Design des Abtastfensters und den Aufwand für die Kommutierungssteuerung tolerieren kann. Bei gleichmäßigem Betrieb ist der Nulldurchgang der Gegen-EMK praktisch und weit verbreitet. Bei niedriger Geschwindigkeit und während des Starts ist er weniger verzeihlich. Diese Unterscheidung sollte bereits am ersten Tag Teil der Kostendiskussion sein, nicht erst in Woche zweiundzwanzig.
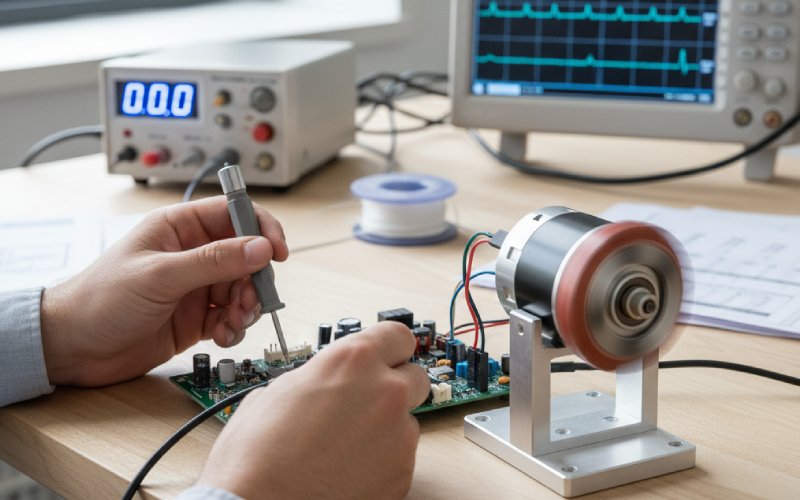
Wenn Sie eine gebürstete Plattform verwenden, entscheiden die Details des Kommutators, ob sie sauber ausgeliefert wird.
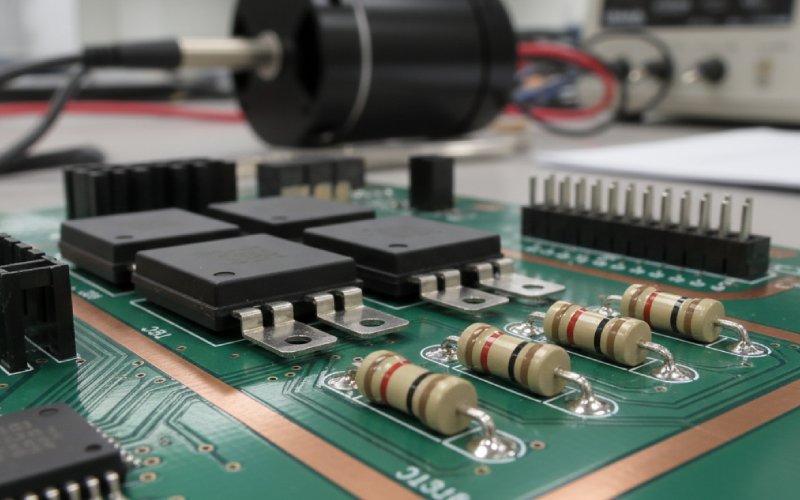
Hier beginnt unsere Fabrikarbeit. Ein bürstenbehafteter Motor ist nicht erfolgreich, weil auf der Zeichnung “Kommutator” steht. Er ist erfolgreich, weil der Kommutierungssatz als funktionierendes System aufeinander abgestimmt ist: Kommutatoroberfläche, Bürstenqualität, Federdruck, Halterpassung und das thermische Stromprofil, das der Motor im Betrieb tatsächlich aufweist. Wenn diese Teile als separate Einkaufslinien behandelt werden, treten Funkenbeschwerden meist erst später auf. Normalerweise in Dauertests. Manchmal auch im Feld.
Die Oberflächenbeschaffenheit ist eines der ersten Dinge, auf die wir achten. Eine Kommutatoroberfläche kann nicht zu glatt und nicht zu rau sein, wenn das Ziel eine stabile Stromübertragung und ein guter Bürstensitz ist. Übermäßige Glimmerhöhe verursacht ebenfalls Probleme. Das Gleiche gilt für Grate und einen schlechten Zustand der Stangenkanten. Das hört sich nach kleinen Werkstattdetails an. Das sind sie aber nicht, wenn der Bürstenfilm instabil wird.
Als nächstes kommt die Anpassung der Bürsten. Die Bürste und der Kommutator sind ein Paar, nicht zwei unabhängige Teile. Reibungsgrad, Kontaktverhalten, Stromverteilung und Verschleißmuster hängen alle von dieser Paarung ab. Der Federdruck muss hoch genug sein, um den Kontakt aufrechtzuerhalten, aber gleichmäßig auf alle Bürsten verteilt. Zu wenig Druck und der Kontakt wird instabil. Ist er zu hoch, steigen Reibung und Verschleiß. Das Halterspiel ist aus demselben Grund wichtig: Eine Bürste, die klemmt oder klappert, kann nicht lange sauber kommutieren.
Das ist auch der Grund, warum ein Angebot für einen Kommutator niemals allein auf dem Durchmesser und der Anzahl der Segmente basieren sollte. Spannung, Stromstärke, Einschaltdauer, Spitzenlast, angestrebte Lebensdauer, Bürstenmaterial, Drehzahl und das tatsächliche Schaltprofil gehören alle in die Überprüfung. Wenn diese Angaben fehlen, kann die Zeichnung noch so vollständig aussehen. Das Produkt wird es nicht sein.
Häufig gestellte Fragen
Ist ein mechanischer Kommutator immer noch eine vernünftige Wahl für neue Motorprogramme?
Ja. In vielen Anwendungen kann sowohl die bürstenbehaftete als auch die bürstenlose Architektur eingesetzt werden. Die mechanische Kommutierung bleibt eine gute Wahl, wenn das Projekt niedrige Systemkosten, einfache Steuerung, weniger externe Komponenten und einen schnelleren Weg zur Produktion gegenüber den Vorteilen einer bürstenlosen Plattform in Bezug auf Lebensdauer und Geschwindigkeit bevorzugt.
Verringert die sensorlose Kommutierung immer die Gesamtkosten des Systems?
Nein. Durch den Wegfall der diskreten Positionssensoren kann zwar die Anzahl der Teile reduziert werden, aber es verlagert sich die Arbeit in die Startlogik, die Kommutierungssteuerung, die Abtaststrategie, die Leistungselektronik und die Validierung. Bei Projekten, bei denen diese Entwicklungskosten erheblich sind, verbessern sich die Gesamtsystemkosten möglicherweise nicht so stark, wie es der Vergleich mit einem reinen Motor vermuten lässt.
Warum verwenden einige BLDC-Programme immer noch Hallsensoren anstelle einer sensorlosen Steuerung?
Denn sensorlose Gegen-EMK-Methoden sind am stärksten, wenn sich der Motor bereits dreht und ein verwertbares Signal erzeugt. Bei Null-Drehzahl und sehr niedrigen Drehzahlen muss der Startvorgang durch Ausrichten, Zwangskommutierung oder eine andere Steuerungsstrategie erfolgen. Positionssensoren vereinfachen diesen Teil des Betriebsbereichs.
Was verkürzt in der Regel zuerst die Lebensdauer des Kommutators?
Instabiler Bürstenkontakt, falsche Bürstenpaarung, schlechter Oberflächenzustand, übermäßiger Glimmer, Grate, ungleicher Federdruck und anhaltende Funkenbildung sind häufige Ursachen. Dies sind keine isolierten Fehler. Sie stehen in Wechselwirkung. Ein Oberflächenproblem wird oft zu einem Bürstenproblem, dann zu einem Verschleißproblem und schließlich zu einem Problem mit dem elektrischen Geräusch.
Kann ein Bürstenmotor noch mit PWM gesteuert werden?
Ja. Ein Grund, warum Bürstenmotoren nach wie vor nützlich sind, ist, dass die Drehzahlregelung einfach ist. Die angelegte Gleichspannung ändert die Geschwindigkeit in einem weiten Bereich, und PWM mit einer H-Brücke ist ein Standardansatz, wenn variable Geschwindigkeit oder bidirektionale Bewegung erforderlich ist.
Welche Informationen benötigen Sie, um eine Anfrage für einen kundenspezifischen Kommutator zu prüfen?
Wir beginnen in der Regel mit der Rotorhüllkurve, der Wellendrehzahl, der Spannung, dem Dauer- und Spitzenstrom, der Einschaltdauer, der angestrebten Lebensdauer, dem Bürstenmaterial, dem verfügbaren Bauraum und der Art der Last. Wenn für die Anwendung bereits Daten zum Bürstenverschleiß oder zur Funkenbildung vorliegen, ist das noch hilfreicher. So können wir schnell feststellen, ob die Lösung im Kommutator-Design, in der Bürstenpaarung oder im kompletten Kommutierungssatz liegt.
Schlussbemerkung
Die bessere Wahl ist nicht diejenige mit dem besseren Slogan. Es ist diejenige, die zur Produktarchitektur passt.
Wenn Ihr Programm eine kompakte, bewährte und kostengünstige bürstenbehaftete Lösung benötigt, ist die mechanische Kommutierung immer noch eine ernsthafte technische Lösung. Wenn Ihr Programm bereits in den Bereich der langlebigen, schnellen und wartungsarmen Motoren vorgedrungen ist, dann ist die bürstenlose elektronische Kommutierung vielleicht die sauberere Lösung. Der Fehler liegt nicht darin, sich für das eine oder das andere zu entscheiden. Der Fehler besteht darin, nur den Motor zu vergleichen und das gesamte System um ihn herum zu ignorieren.