Bürstenbehaftete vs. bürstenlose Gleichstrommotoren: Mechanischer Kommutator oder elektronische Kommutierung?
Wenn ein Motorprojekt schief läuft, ist die Ursache oft nicht das Drehmoment. Auch nicht die Spannung.
Es ist die Wahl der Kommutierung.
Zu viele Entwürfe werden auf der Ebene der Motorkategorie beurteilt: Bürstenmotor oder bürstenloser Motor, bürstenbehafteter Gleichstrom oder BLDC. Das ist nützlich, aber nur bis zu einem gewissen Punkt. In der tatsächlichen Produktion ist die eigentliche Frage einfacher und schwieriger zugleich:
Wo soll der Stromwechsel stattfinden?
Im Inneren des Motors, durch eine mechanischer Kommutator und Bürsten.
Oder innerhalb des Laufwerks, durch elektronische Kommutierung auf der Grundlage einer magnetischen Positionsrückmeldung oder einer Steuerlogik.
Alles, was danach kommt, ändert sich durch diese Entscheidung. Abnutzungsmuster. Anfahrverhalten. Geräusche. Wartungsintervall. Kosten der Steuerung. Fehlermodus. Auch wie einfach es ist, dem Endkunden das Design zu erklären.
Bei unserer Arbeit in den Fabriken trennen sich hier normalerweise die guten von den teuren Projekten.
Inhaltsverzeichnis
Warum diese Wahl bei der Entwicklung industrieller Gleichstrommotoren immer noch wichtig ist
Viele Einkaufsteams kennen den Unterschied zwischen einem bürstenbehafteten und einem bürstenlosen Motor bereits aus dem Lehrbuch. Dieser Teil ist nicht das Problem.
Das Problem ist, dass sich viele Vergleiche auf allgemeine Behauptungen beschränken:
- Bürstenmotoren sind einfacher
- bürstenlose Motoren halten länger
- BLDC ist effizienter
- mechanische Kommutatoren verschleißen
Das alles stimmt in gewisser Weise. Nicht genug, um eine sichere OEM-Entscheidung zu treffen.
Ein mechanischer Kommutator ist nicht nur eine alte Lösung. In vielen industriellen Programmen ist er immer noch die praktikablere Lösung, vor allem, wenn das System benötigt wird:
- direkte DC-Versorgung
- einfache Inbetriebnahme unter Last
- Kosten für eine kontrollierte Steuerung
- berechenbarer Außendienst
- einfache Austauschlogik
- moderate Geschwindigkeit mit realistischem Wartungszugang
Auf der anderen Seite ist die elektronische Kommutierung oft die bessere Lösung, wenn es wirklich darauf ankommt:
- Dauerbetrieb
- höhere Geschwindigkeit
- geringe Wartungserwartung
- saubereres EMI-Verhalten
- Strengere Regelkreise
- bessere Wärmehaltung über lange Zeiträume
Das ist der sinnvolle Vergleich. Nicht Ideologie. Die Anwendung passt.
Mechanischer Kommutator vs. elektronische Kommutierung: der praktische Unterschied
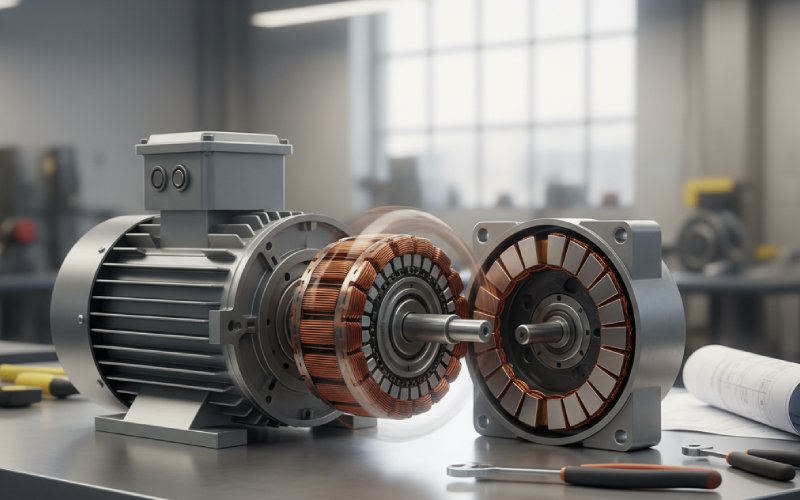
A mechanischer Kommutator schaltet den Strom physisch durch die Bürsten- und Segmentschnittstelle.
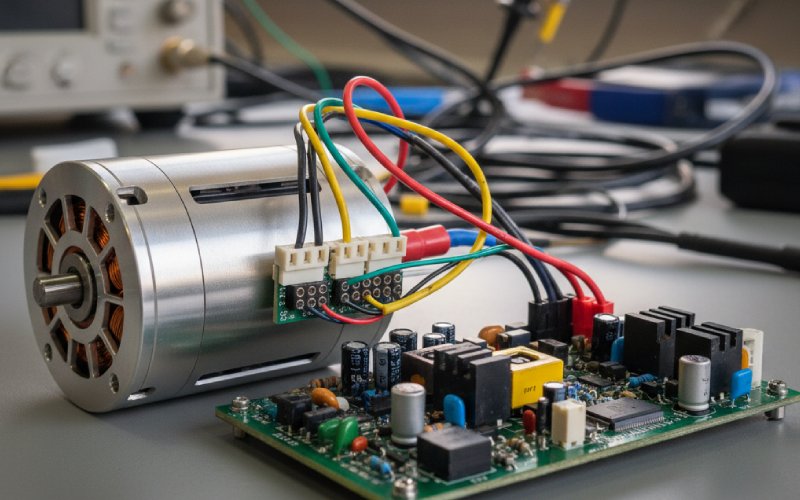
Ein elektronische Kommutierung Das System schaltet den Strom im Regler, wobei die Rotorposition von Hallsensoren, anderen magnetischen Rückkopplungen oder einer sensorlosen Schätzung übernommen wird.
Die erste löst die Kommutierung mit Teilen, die sich berühren.
Der zweite löst das Problem mit Timing.
Das klingt ordentlich und sauber. Ist es aber nicht.
Die mechanische Kommutierung führt zu Kontaktverschleiß, Bürstenstaub, Oberflächenverfolgung, Lichtbogengefahr und einer deutlich sichtbaren Lebensdauerkurve. Sie können sie inspizieren. Oft kann man den nächsten Ausfall vorhersagen, bevor er eintritt.
Durch die elektronische Kommutierung entfällt zwar die Bürstenschnittstelle, aber das Kommutierungsproblem wird dadurch nicht gelöst. Es verlagert sich in den Bereich der Steuerungsentwicklung, der Phasenumschaltlogik, der Sensorplatzierung, des Startalgorithmus und des Rauschverhaltens unter realer Last. Wenn dies gut gemacht ist, läuft der Motor wunderbar. Wenn es schlecht gemacht ist, dreht sich der Motor vielleicht noch, aber das System wird laut, instabil, heiß oder seltsam anfällig.
Wir sehen beides.
Schnellvergleichstabelle
| Artikel | Mechanischer Kommutator (Bürstenmotor) | Elektronische / magnetische Kommutierung (bürstenlos / BLDC) |
|---|---|---|
| Aktuelles Schalten | Im Inneren des Motors durch Bürsten und Kommutatorsegmente | Innerhalb der Steuerung durch Phasenumschaltung |
| Hauptverschleißstelle | Schnittstelle Bürste und Kommutator | Leistungselektronik, Sensoren, Schaltqualität |
| Anfahren bei Drehzahl Null | Normalerweise einfach | Hängt von der Kontrollmethode ab; sensorgesteuerte Systeme können dies besser handhaben |
| Art der Pflege | Regelmäßige Wartung, sichtbarer Verschleiß, austauschbare Verschleißteile | Weniger routinemäßige Motorwartung, größere Abhängigkeit von der Zuverlässigkeit der Steuerung |
| Thermischer Pfad | Wärme, die sich in der rotierenden Armatur konzentriert, kann schwieriger zu entfernen sein | Die Statorwicklungen erleichtern in der Regel die Wärmeabfuhr |
| EMI-Verhalten | Bürstenlichtbögen können EMI und Lärm verursachen | Keine Bürstenüberschläge, aber Schaltgeräusche müssen noch kontrolliert werden |
| Geschwindigkeitsbereich | Gut für moderate Geschwindigkeiten; begrenzt durch Bürsten und Kommutatorverhalten | Besser geeignet für Anwendungen mit höherer Geschwindigkeit |
| Controller-Kosten | Geringere Komplexität des Motorsystems | Höhere Komplexität der Steuerung, mehr Elektronik |
| Reparierbarkeit im Feld | Oftmals einfacher in traditionellen industriellen Umgebungen | In der Regel niedriger auf Motorebene, stärker antriebsabhängig |
| Beste Passform | Kostensensitive, intermittierend arbeitende, wartungsfähige Systeme | Hochbelastbare, wartungsarme und leistungsfähige Systeme |
Wo ein mechanischer Kommutator noch gewinnt
Dieser Teil ist für die Käufer wichtig, denn ein mechanischer Kommutator wird oft zu früh abgelehnt.
In realen Produktionsumgebungen ist ein Bürstenmotor mit einem gut gemachten mechanischen Kommutator immer noch sehr sinnvoll, wenn die Systemprioritäten eher praktisch als modisch sind.
1. Wenn das Budget des Controllers wichtiger ist als die Effizienz der Broschüre
Manche Projekte sind an der richtigen Stelle kostensensibel. Nicht billig. Nur diszipliniert.
Wenn die Maschine einen stabilen Gleichstrombetrieb ohne ein komplexeres Antriebspaket benötigt, ist der mechanische Kommutator nach wie vor eine gute Wahl. Die Motorarchitektur ist einfacher. Die unterstützende Elektronik ist leichter. Die Validierung ist oft kürzer. Und wenn der Arbeitszyklus eher intermittierend als kontinuierlich ist, kann der Kompromiss bei der Lebensdauer sehr vernünftig sein.
Wir liefern nach wie vor Kommutatorprogramme für Anwendungen, bei denen der Kunde genau dieses Gleichgewicht wünscht.
2. Wenn der Start direkt und vorhersehbar sein muss
Ein Bürstenmotor benötigt keine Schätzung der Rotorposition, um in Gang zu kommen.
Das klingt einleuchtend. Es wird schnell wichtig, wenn die Last schwergängig ist, die Stromversorgung einfach ist oder das System ohne viel Steuerungsintelligenz dahinter zuverlässig starten muss.
In diesen Fällen stellt der mechanische Kommutator keinen Kompromiss dar. Er ist die sicherere Architektur.
3. Wenn die Wartung akzeptabel ist, aber Überraschungen bei Ausfallzeiten nicht
Der Verschleiß von Bürsten ist ein Nachteil. Es ist auch ein sichtbarer Nachteil.
In vielen Industrieanlagen befassen sich die Wartungsteams lieber mit einer Verschleißkomponente, die sie kennen, als ein Steuerungsproblem zu beheben, das nur bei bestimmten Drehzahl- und Temperaturkombinationen auftritt. Das ist eine echte Vorliebe in der Praxis. Nicht jeder Käufer sagt das gleich, aber es beeinflusst die endgültige Entscheidung.
Ein Kommutatorsystem kann inspiziert werden. Die Abnutzung der Bürsten kann nachvollzogen werden. Der Zustand der Segmentoberfläche gibt Aufschluss. Diese Servicelogik hat immer noch ihren Wert.
4. Wenn die Umwelt der Elektronik zusetzt
Nicht jede Maschine läuft in einem sauberen Schrank mit freundlichen Wärmespannen.
Staub, Vibrationen, instabile Versorgungsbedingungen, aggressive Start-Stopp-Zyklen und begrenzter Platz für die Steuerung zwingen manche Projekte zu einer direkteren Motorarchitektur zurück. In diesen Fällen ist die richtige Frage nicht, ob bürstenlose Motoren technisch fortschrittlich sind. Die richtige Frage ist, ob das Gesamtsystem im Laufe der Zeit einfacher oder schwieriger stabil zu halten ist.
Manchmal ist die altmodische Antwort die industriellere.
Wo die elektronische oder magnetische Kommutierung eindeutig die Nase vorn hat
Es gibt auch viele Fälle, in denen ein bürstenloser Motor oder ein BLDC-System von Anfang an die richtige Wahl ist.
Wir tun nicht so, als ob es anders wäre.
1. Hohe Einschaltdauer und Dauerbetrieb
Läuft der Motor über einen längeren Zeitraum, beginnt die thermische Behandlung den Auswahlprozess zu dominieren. Die elektronische Kommutierung hat hier in der Regel einen besseren strukturellen Vorteil, da die Wicklungen am Stator befestigt sind und die Wärme den Motor direkter verlassen kann.
Das verändert die Dauerlastfähigkeit. Es ändert auch, wie viel Spielraum das Design hat, wenn die reale Betriebsumgebung schlechter ist als der Labortest.
2. Pflegeleichte Produkte
Wenn das Geschäftsmodell von langen Wartungsintervallen, weniger Eingriffen vor Ort oder abgedichteten Baugruppen abhängt, haben bürstenlose Konstruktionen einen klaren Systemvorteil. Kein Bürstenstaub. Kein Verschleiß der Kommutatorbahn. Weniger Verschleißteile im Motor selbst.
Natürlich muss der Controller richtig gemacht werden. Aber wenn das der Fall ist, ist die Wartungsgeschichte besser.
3. Bessere Flexibilität bei der Kontrolle
Drehzahlregelung, Stromformung, Sanftanlaufverhalten, Diagnosefunktionen, Lastverhalten. Diese Dinge lassen sich leichter in elektronisch kommutierte Systeme einbauen. Nicht kostenlos. Einfacher.
Wenn der Motor als Teil einer größeren Steuerungsarchitektur arbeiten muss und sich nicht nur drehen soll, steigt der Wert der elektronischen Kommutierung schnell an.
4. Programme mit höherer Geschwindigkeit
Bei höheren Drehzahlen ist die Schnittstelle zwischen Bürste und Kommutator der falsche Ort, um die Schaltlast zu tragen. Hier sind bürstenlose Architekturen in der Regel die sauberere Lösung, sowohl aus Sicht der Lebensdauer als auch der Stabilität.
Die Teilekäufer unterschätzen in der Regel
Die Wahl zwischen bürstenbehaftet und bürstenlos ist selten eine Fehlentscheidung.
Die Ursache ist, dass man sich aus dem falschen Grund entscheidet.
Nachfolgend sind die häufigsten Fehler aufgeführt, die wir feststellen, wenn Kunden mechanische und elektronische Kommutierungsoptionen prüfen.
Fehler 1: Nur den Wirkungsgrad des Motors vergleichen
Dies ist eine der am häufigsten verwendeten Abkürzungen.
Ein BLDC-Motor mag in Bezug auf die Motoreffizienz besser aussehen. Gut. Aber wenn das Projekt eine komplexere Steuerung, strengere EMV-Arbeiten, mehr Zeit für die Validierung und eine schwierigere Fehleranalyse im Feld erfordert, können sich die Gesamtsystemkosten in die falsche Richtung bewegen.
Ein Bürstenmotor sieht vielleicht weniger elegant aus. Aber wenn er die Entwicklung verkürzt, die Beschaffung vereinfacht und dem Arbeitszyklus entspricht, kann er immer noch die bessere Wahl für die Industrie sein.
Der Motor lebt nicht allein. Der Motor lebt in einem Projekt.
Fehler 2: Die Annahme, bürstenlos bedeute standardmäßig leise und sanft
Nicht immer.
Wenn das elektronische Kommutierungs-Timing schlecht ist, wenn die Hall-Platzierung nicht stimmt, wenn die Startlogik grob ist oder wenn die Anwendung zu viel Zeit in einer schwachen Betriebszone verbringt, kann das System Drehmomentwelligkeit, Schaltgeräusche, Vibrationen und hörbare elektrische Unruhe erzeugen.
Keine Bürsten, ja. Keine Probleme, nein.
Fehler 3: Die Lebensdauer des mechanischen Kommutators als feste Zahl betrachten
Die Lebensdauer des Kommutators ist nicht nur eine Frage des Bürstenmaterials. Es geht auch nicht nur um Strom.
Bei unseren Produktionsüberprüfungen wird das Ergebnis in der Regel durch eine Kombination von Faktoren bestimmt:
- Materialauswahl im Segment
- Anpassung der Bürstenqualität
- Konsistenz der Oberflächenbeschaffenheit
- Rundlaufkontrolle
- Stromdichte
- Federkraft
- Einschaltdauer Realität
- PWM-Strategie im Gesamtsystem
Dieser letzte Punkt wird oft zu lange ignoriert.
Ein anständiger Kommutator kann in der falschen elektrischen Umgebung schlecht altern. Ein gut angepasster Kommutator kann viel sauberer laufen als erwartet.
Fehler 4: Verwendung von BLDC ohne Sensoren, wenn die Anwendung dies nicht unterstützt
Die sensorlose elektronische Kommutierung kann im richtigen Drehzahlfenster sehr gut funktionieren. Beim Anfahren mit niedriger Drehzahl, bei instabiler Belastung, bei wiederholter Umkehrung oder bei starken Störungen kann sie jedoch schnell an ihre Grenzen stoßen.
Wenn die Anwendung hart und sauber anlaufen muss, ist die Steuerungsmethode von großer Bedeutung. Käufer vergleichen oft Motortypen und lassen dieses Detail außer Acht. Später wird dann der Motor für eine Steuerungsentscheidung verantwortlich gemacht.
Was wir bei Kommutatorprojekten als erstes betrachten
Wenn uns ein Kunde eine neue Anfrage schickt, beginnen wir nicht mit der Katalogsprache.
Wir beginnen in der Regel mit fünf Dingen:
- Ausgangssituation
Läuft der Motor unbelastet, leicht belastet oder gegen einen echten Widerstand an? - Einschaltdauer
Intermittierender, wiederholter kurzer Zyklus oder Dauerbetrieb? - Betriebsgeschwindigkeit
Mäßige Geschwindigkeit mit Servicezugang ist die eine Welt. Versiegelter Hochgeschwindigkeitsbetrieb ist eine andere. - Controller Realität
Ist der Kunde tatsächlich auf einen fortschrittlicheren Antrieb vorbereitet, oder versucht das Design noch, elektrisch einfach zu bleiben? - Erwartung an die Dienstleistung
Ist eine regelmäßige Wartung akzeptabel? Oder soll das Produkt lange mit minimalen Eingriffen laufen?
Die meisten Auswahlfehler treten genau dort auf.
Nicht später im Datenblatt. Genau dort.
Wie wir die Leistung mechanischer Kommutatoren in der Produktion verbessern
Wenn Kunden uns bitten, die Lebensdauer des Kommutators zu verlängern oder Schaltprobleme in einem Bürstenmotor zu verringern, antworten wir nicht mit einer allgemeinen Aussage wie “die Konstruktion optimieren”. Damit ist niemandem geholfen.
Wir arbeiten das Problem anhand von Produktionsdetails auf:
Stabilität der Bürstenspur
Wenn die Kontaktbahn instabil ist, wird auch das gesamte Verschleißbild instabil. Oberflächenbeschaffenheit, Konzentrizität und Qualität der Segmentübergänge sind wichtiger, als viele Käufer erwarten.
Materialpaarung
Das Kommutatormaterial und die Bürstenqualität müssen an das reale Stromprofil angepasst werden, nicht an das ideale. Eine Fehlanpassung kann bei einem kurzen Test auf dem Prüfstand akzeptabel sein, im Feldeinsatz aber viel schneller abnehmen.
Segmentgeometrie
Die Anzahl der Segmente, die Isolationsanordnung, der Zustand der Kanten und die mechanische Präzision wirken sich alle auf die Qualität der Kommutierung aus. Bei anspruchsvolleren Programmen machen sich kleine geometrische Fehler als Rauschen, lokale Erwärmung oder ungleichmäßige Abnutzung bemerkbar.
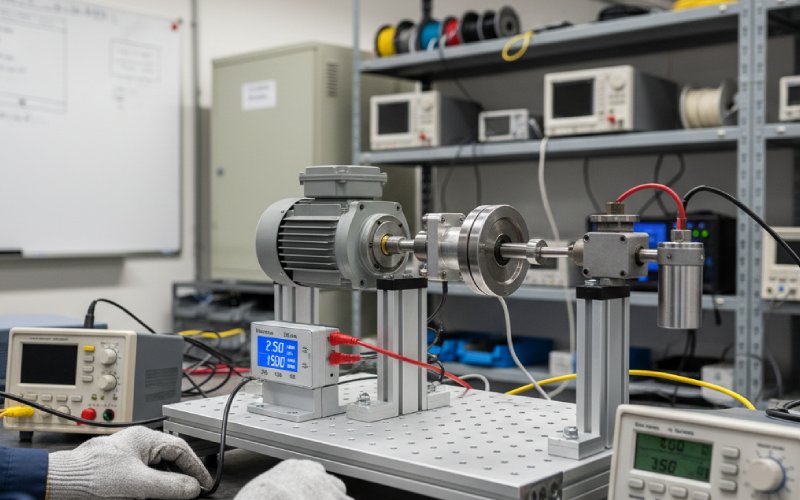
Stromdichte und Überlast Realität
Einige Kunden spezifizieren ihre Produkte unter Nennbedingungen und arbeiten dann mit Überlastspitzen. Diese Lücke ist wichtig. Wir überprüfen das Strommuster frühzeitig, denn Kommutatorschäden sind oft kumulativ, bevor sie sichtbar werden.
Wiederholbarkeit der Herstellung
Eine gute Probe ist nicht das Ziel. Das Ziel ist die Chargenkonsistenz. Für die Erstausrüster ist die eigentliche Frage, ob das Verhalten des Kommutators über die Serienproduktion hinweg kontrolliert bleibt.
Hier zählt die Erfahrung des Unternehmens mehr als eine schöne Formulierung.
Welche Option sollten Sie wählen?
Hier ist die kurze Antwort, die wir tatsächlich verwenden.
Wählen Sie eine mechanischer Kommutator-Bürstenmotor wenn Sie es brauchen:
- einfache DC-Architektur
- Direktanlauf
- Kosten für kontrollierte Elektronik
- moderate Geschwindigkeit
- wartungsfähige Verschleißteile
- praktische Feldpflege
- solide Leistung in Systemen mit intermittierendem Betrieb
Wählen Sie eine Elektronisch kommutierter bürstenloser Motor oder BLDC-Motor wenn Sie es brauchen:
- langer Dauerbetrieb
- geringere routinemäßige Wartung
- bessere Geschwindigkeitskontrolle
- höhere Arbeitsgeschwindigkeit
- verbesserter thermischer Pfad
- engere Integration mit fortschrittlicher Antriebslogik
- geringere Abhängigkeit von Dienstleistungen im Zusammenhang mit Bürsten
Liegt der Antrag dazwischen, kommt es in der Regel auf eine Entscheidung an:
Würden Sie lieber den Verschleiß oder die Komplexität der Kontrolle verwalten?
Das ist eine stumpfe Art, es zu sagen. Trotzdem nützlich.
Mechanischer Kommutator oder elektronische Kommutierung für OEM-Kunden
Für OEM- und Industriekunden sollte die Auswahl nicht bei der Frage “welcher Motor ist besser” aufhören.”
Eine bessere Frage wäre:
Welche Kommutierungsmethode macht es einfacher, das gesamte Produkt zu erstellen, zu validieren, zu liefern, zu warten und zu erklären?
Das ist die Werksansicht.
Wenn Ihr Team auf Kostendisziplin, unkomplizierten Service und bewährte Bürstenmotorarchitektur setzt, ist ein guter mechanischer Kommutator in der modernen Gleichstrommotorenkonstruktion immer noch sehr lebendig.
Wenn Ihr Team auf einen wartungsarmen Betrieb, eine strengere Kontrolle und höhere Betriebsanforderungen Wert legt, hat die elektronische Kommutierung in der Regel die Nase vorn.
Beides kann richtig sein.
Der falsche Teil ist die Wahl der richtigen Motorenfamilie für die falsche Betriebslogik.
Häufig gestellte Fragen
Was ist der Unterschied zwischen einem mechanischen Kommutator und einer elektronischen Kommutierung?
Ein mechanischer Kommutator schaltet den Strom physisch in einem Bürstenmotor durch Bürsten und segmentierte Kupferflächen. Die elektronische Kommutierung schaltet den Strom in der Steuerung, in der Regel in einem bürstenlosen Motor oder BLDC-Motor, mithilfe von Positionsrückmeldung oder Steuerlogik.
Ist ein Bürstenmotor immer billiger als ein bürstenloser Motor?
Nicht immer in Bezug auf die Gesamtprojektkosten, aber oft einfacher auf der Systemebene. Ein bürstenbehafteter Motor mit mechanischem Kommutator kann in vielen industriellen Anwendungen die Komplexität der Steuerung reduzieren und die Entwicklungszeit verkürzen. Ein bürstenloser Motor kann den späteren Wartungsaufwand verringern, aber der elektronische Aufwand ist höher.
Ist BLDC immer besser als ein Bürstenmotor?
Nein. BLDC-Motoren eignen sich oft besser für Dauerbetrieb, höhere Drehzahlen, geringeren Wartungsaufwand und fortschrittliche Steuerung. Ein bürstenbehafteter Motor kann immer noch die bessere Wahl sein, wenn die Einfachheit der Inbetriebnahme, geringere Kosten für die Steuerung und wartbare Verschleißteile wichtiger sind.
Wann sollte ich einen mechanischen Kommutator wählen?
Wählen Sie einen mechanischen Kommutator, wenn die Anwendung eine moderate Geschwindigkeit, einen realistischen Wartungszugang, eine kostensensitive Steuerungsarchitektur und einen Arbeitszyklus aufweist, der den Bürstenverschleiß nicht übermäßig belastet.
Beseitigt die elektronische Kommutierung alle Probleme mit Motorgeräuschen?
Nein. Es beseitigt zwar Bürstenkontaktgeräusche und Lichtbögen, aber eine schlechte Schaltstrategie, eine schwache Anlaufsteuerung oder Probleme mit dem Timing können immer noch Vibrationen, hörbare Geräusche und Drehmomentwelligkeit verursachen.
Kann die Lebensdauer des Kommutators verbessert werden, ohne die gesamte Motorkonstruktion zu ändern?
Häufig ja. In vielen Fällen ergibt sich die Verbesserung der Lebensdauer aus einer besseren Anpassung der Bürsten, der Präzision der Segmente, der Materialauswahl, der Kontrolle der Oberflächenqualität und einer ehrlicheren Überprüfung des tatsächlichen Arbeitszyklus.
Ist der sensorlose BLDC für alle Anwendungen geeignet?
Nein. Die sensorlose elektronische Kommutierung ist in der Regel bei sehr niedrigen Drehzahlen, unter schwieriger Anlauflast oder bei Anwendungen mit häufigen abrupten Änderungen weniger komfortabel. In diesen Fällen ist oft eine sensorische Steuerung oder eine andere Motorstrategie erforderlich.
Benötigen Sie Hilfe bei der Wahl der richtigen Kommutierungsmethode?
Wenn Sie eine mechanischer Kommutator, a Bürstenmotor, oder eine Elektronische BLDC-Kommutierung Design für ein neues OEM-Projekt, Senden Sie uns zuerst die Arbeitsdaten:
- Spannung
- aktuell
- Geschwindigkeitsbereich
- Startlast
- Arbeitszyklus
- Bürstenmaterial, falls bereits definiert
- Lebensdauerziel
- Platzgrenze
Unser Ingenieurteam kann die Anwendung prüfen und eine Kommutatorstruktur oder motorseitige Anpassung vorschlagen, die für die Serienproduktion geeignet ist und nicht nur für Labortests.










