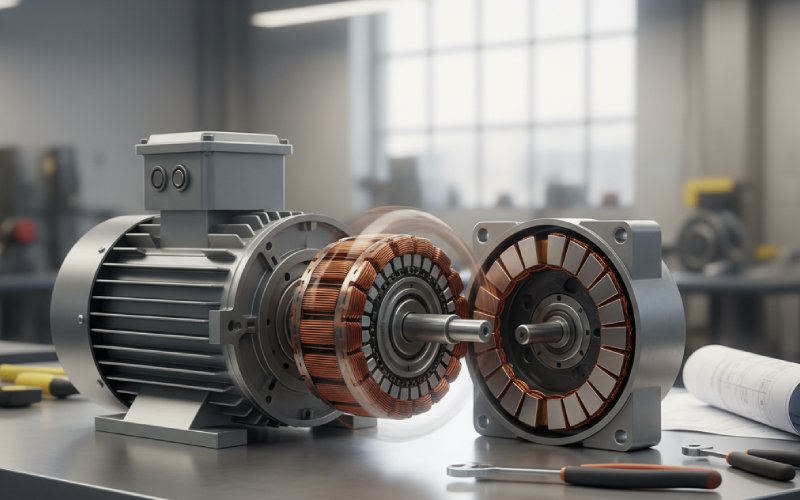
Moteurs à courant continu avec ou sans balais : Commutateur mécanique ou électronique ?
Lorsqu'un projet de moteur tourne mal, la cause première n'est souvent pas le couple. Ce n'est pas non plus la tension.
C'est le choix de la commutation.
Trop de conceptions sont jugées au niveau de la catégorie de moteur : moteur à balais ou moteur sans balais, CC à balais ou BLDC. C'est utile, mais seulement jusqu'à un certain point. En production réelle, la vraie question est à la fois plus simple et plus difficile :
Où voulez-vous que le changement de courant se produise ?
A l'intérieur du moteur, par l'intermédiaire d'un commutateur mécanique et des pinceaux.
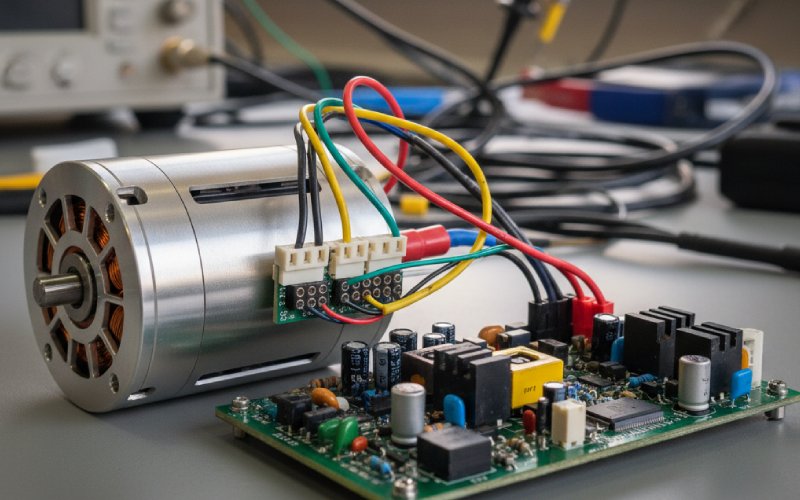
Ou à l'intérieur du lecteur, à travers commutation électronique sur la base d'un retour d'information sur la position magnétique ou d'une logique de commande.
Tout ce qui se passe en aval change à partir de cette décision. Modèle d'usure. Le comportement au démarrage. Bruit. Intervalle d'entretien. Coût du contrôleur. Mode de défaillance. Même la facilité avec laquelle il est possible d'expliquer la conception au client final.
Dans notre travail en usine, c'est généralement là que les bons projets se séparent des projets coûteux.
Table des matières
Pourquoi ce choix est encore important dans la conception des moteurs industriels à courant continu
De nombreuses équipes d'acheteurs connaissent déjà la différence entre un moteur à balais et un moteur sans balais. Ce n'est pas là le problème.
Le problème est que de nombreuses comparaisons s'arrêtent à des affirmations générales :
- les moteurs à balais sont plus simples
- les moteurs sans balais durent plus longtemps
- La BLDC est plus efficace
- les collecteurs mécaniques s'usent
Tout cela est vrai dans une certaine mesure. Ce n'est pas suffisant pour prendre une décision sûre en matière d'équipement d'origine.
Un collecteur mécanique n'est pas seulement une vieille solution. Dans de nombreux programmes industriels, c'est toujours la solution la plus pratique, en particulier lorsque le système a besoin d'être entretenu :
- alimentation directe en courant continu
- démarrage simple sous charge
- Coût d'un contrôleur contrôlé
- service sur le terrain prévisible
- logique de remplacement facile
- vitesse modérée avec un accès réaliste pour l'entretien
D'autre part, la commutation électronique est souvent la meilleure solution lorsque la pression est réelle :
- service continu
- vitesse plus élevée
- peu d'attente en matière d'entretien
- un comportement plus propre face aux interférences électromagnétiques
- un contrôle plus serré en boucle fermée
- meilleure gestion de la chaleur sur une longue durée
Telle est la comparaison utile. Pas l'idéologie. L'adéquation de l'application.
Commutateur mécanique ou électronique : la différence en pratique
A commutateur mécanique Le courant de commutation passe physiquement par l'interface entre le balai et le segment.
Un commutation électronique Le système de contrôle de la position du rotor est déterminé par des capteurs à effet Hall, par d'autres mesures magnétiques ou par une estimation sans capteur.
La première résout la commutation avec des pièces qui se touchent.
La deuxième solution consiste à choisir le bon moment.
Cela semble propre et net. Ce n'est pas le cas.
La commutation mécanique entraîne l'usure des contacts, la poussière des brosses, le suivi des surfaces, le risque d'arc électrique et une courbe de durée de vie très visible. Vous pouvez l'inspecter. Vous pouvez souvent prédire la prochaine panne avant qu'elle n'arrive.
La commutation électronique supprime l'interface du balai, certes, mais elle ne supprime pas le problème de la commutation. Elle le déplace dans la conception du contrôleur, la logique de commutation de phase, le placement des capteurs, l'algorithme de démarrage et le comportement du bruit sous charge réelle. Lorsque cela est bien fait, le moteur fonctionne à merveille. Lorsque c'est mal fait, le moteur peut encore tourner, mais le système devient bruyant, instable, chaud ou étrangement fragile.
Nous voyons les deux.
Tableau comparatif rapide
| Article | Commutateur mécanique (moteur à balais) | Commutation électronique / magnétique (sans balais / BLDC) |
|---|---|---|
| Commutation de courant | A l'intérieur du moteur, à travers les balais et les segments du collecteur | A l'intérieur du contrôleur par commutation de phase |
| Point d'usure principal | Interface balai et collecteur | Électronique de puissance, capteurs, qualité de commutation |
| Démarrage à vitesse nulle | Généralement simple | Dépend de la méthode de contrôle ; les systèmes à capteurs gèrent mieux ce problème. |
| Style d'entretien | Entretien périodique, usure visible, pièces d'usure remplaçables | Moins d'entretien courant du moteur, plus de dépendance à l'égard de la fiabilité du contrôleur |
| Trajet thermique | La chaleur concentrée dans l'armature rotative peut être plus difficile à éliminer. | Les enroulements du stator facilitent généralement l'évacuation de la chaleur |
| Comportement EMI | Les arcs électriques des brosses peuvent provoquer des interférences électromagnétiques et du bruit. | Pas d'arc de brosse, mais le bruit de commutation doit encore être contrôlé |
| Plage de vitesse | Bon pour une vitesse modérée ; limité par les broussailles et le comportement du collecteur | Mieux adapté aux applications à vitesse élevée |
| Coût du contrôleur | Complexité moindre du système moteur | Contrôle plus complexe, plus d'électronique |
| Réparabilité sur le terrain | Souvent plus facile dans les installations industrielles traditionnelles | Généralement plus faible au niveau du moteur, plus dépendant de l'entraînement |
| Meilleure adéquation | Systèmes sensibles aux coûts, à usage intermittent et pouvant être entretenus | Systèmes à haut rendement, nécessitant peu d'entretien et plus performants |
Là où un collecteur mécanique l'emporte encore
Cet aspect est important pour les acheteurs, car un collecteur mécanique est souvent écarté trop tôt.
Dans les environnements de production réels, un moteur à balais doté d'un collecteur mécanique de bonne facture reste très judicieux lorsque les priorités du système sont d'ordre pratique plutôt que d'être à la mode.
1. Quand le budget du contrôleur importe plus que l'efficacité de la brochure
Certains projets sont sensibles aux coûts au bon endroit. Ils ne sont pas bon marché. Juste disciplinés.
Si la machine a besoin d'un fonctionnement stable en courant continu sans un ensemble d'entraînement plus complexe, le collecteur mécanique reste un bon choix. L'architecture du moteur est plus simple. L'électronique de soutien est plus légère. La validation est souvent plus courte. Et lorsque le cycle de travail est intermittent plutôt que continu, le compromis de durée de vie peut être très raisonnable.
Nous continuons à fournir des programmes de collecteurs pour les applications où cet équilibre correspond exactement à ce que souhaite le client.
2. Lorsque le démarrage doit être direct et prévisible
Un moteur à balais n'a pas besoin d'une estimation de la position du rotor pour se mettre en mouvement.
Cela semble évident. Cela devient rapidement important lorsque la charge est importante, que l'alimentation est basique ou que le système doit démarrer de manière fiable sans beaucoup d'intelligence de la part du contrôleur.
Dans ces cas, le collecteur mécanique n'est pas un compromis. C'est l'architecture la plus sûre.
3. Lorsque la maintenance est acceptable, mais que les surprises liées aux temps d'arrêt ne le sont pas
L'usure des brosses est un inconvénient. Elle est également visible.
Dans de nombreuses installations industrielles, les équipes de maintenance préfèrent s'occuper d'un composant d'usure qu'elles comprennent plutôt que de résoudre un problème de contrôle qui n'apparaît que sous certaines combinaisons de vitesse et de température. Il s'agit là d'une véritable préférence sur le terrain. Tous les acheteurs ne le disent pas d'emblée, mais c'est ce qui détermine la décision finale.
Un système de collecteur peut être inspecté. L'usure des brosses peut être suivie. L'état de surface d'un segment est révélateur. Cette logique de service a encore de la valeur.
4. Lorsque l'environnement est difficile pour l'électronique
Toutes les machines ne fonctionnent pas dans une armoire propre avec des marges thermiques favorables.
La poussière, les vibrations, les conditions d'alimentation instables, les cycles de démarrage et d'arrêt agressifs et l'espace limité du contrôleur sont autant de facteurs qui poussent certains projets à revenir à une architecture de moteur plus directe. Dans ces cas, la bonne question n'est pas de savoir si le brushless est techniquement avancé. La bonne question est de savoir si l'ensemble du système devient plus facile ou plus difficile à maintenir stable dans le temps.
Parfois, la réponse la plus ancienne est la plus industrielle.
Lorsque la commutation électronique ou magnétique a une nette longueur d'avance
Il existe également de nombreux cas où un moteur sans balais ou un système BLDC est la bonne solution dès le départ.
Nous ne prétendons pas le contraire.
1. Cycle de travail élevé et fonctionnement continu
Si le moteur fonctionne pendant de longues périodes, le traitement thermique commence à dominer le processus de sélection. La commutation électronique présente généralement un meilleur avantage structurel, car les enroulements sont fixés sur le stator, de sorte que la chaleur peut quitter le moteur plus directement.
Cela modifie la capacité de charge continue. Cela modifie également la marge dont dispose la conception lorsque l'environnement d'exploitation réel s'avère moins bon que le test en laboratoire.
2. Produits nécessitant peu d'entretien
Si le modèle économique dépend de longs intervalles de service, d'une réduction des interventions sur le terrain ou d'assemblages étanches, les conceptions sans balais présentent un avantage certain. Pas de poussière de brosse. Pas d'usure des pistes du collecteur. Moins de pièces d'usure à l'intérieur du moteur lui-même.
Bien entendu, le contrôleur doit être effectué correctement. Mais lorsque c'est le cas, l'histoire de la maintenance est meilleure.
3. Meilleure flexibilité de contrôle
Régulation de la vitesse, mise en forme du courant, démarrage progressif, fonctions de diagnostic, réponse à la charge. Ces éléments sont plus faciles à intégrer dans les systèmes à commutation électronique. Ce n'est pas gratuit. Plus faciles.
Si le moteur doit fonctionner dans le cadre d'une architecture de contrôle plus large, et non simplement tourner, la valeur de la commutation électronique augmente rapidement.
4. Programmes à plus grande vitesse
À une vitesse plus élevée, l'interface entre le balai et le collecteur n'est plus le bon endroit pour supporter la charge de commutation. C'est là que les architectures sans balais deviennent généralement la solution la plus propre du point de vue de la durée de vie et de la stabilité.
La partie que les acheteurs sous-estiment généralement
La mauvaise décision est rarement due au fait de choisir entre un moteur à balais et un moteur sans balais.
Elle est causée par le choix d'une mauvaise raison.
Vous trouverez ci-dessous les erreurs les plus courantes que nous constatons lorsque les clients examinent les options de commutation mécanique et de commutation électronique.
Erreur 1 : Comparer uniquement l'efficacité du moteur
C'est l'un des raccourcis les plus courants.
Un moteur BLDC peut sembler plus performant en termes de rendement. C'est vrai. Mais si le projet ajoute un contrôleur plus complexe, des travaux CEM plus stricts, plus de temps de validation et une analyse des défaillances plus difficile sur le terrain, le coût total du système peut évoluer dans la mauvaise direction.
Un moteur à balais peut sembler moins élégant. Mais s'il permet de raccourcir le développement, de simplifier l'approvisionnement et de s'adapter au cycle de fonctionnement, il peut s'avérer être le choix industriel le plus judicieux.
Le moteur ne vit pas seul. Le moteur vit dans un projet.
Erreur 2 : Supposer que l'absence de balais est synonyme de silence et de douceur par défaut
Pas toujours.
Si la synchronisation de la commutation électronique est mauvaise, si le placement de Hall est désactivé, si la logique de démarrage est approximative ou si l'application passe trop de temps dans une zone de fonctionnement faible, le système peut produire des ondulations de couple, des bruits de commutation, des vibrations et des perturbations électriques audibles.
Pas de brosses, oui. Pas de problèmes, non.
Erreur 3 : Considérer la durée de vie du collecteur mécanique comme un nombre fixe
La durée de vie du commutateur n'est pas seulement une question de matériau de brossage. Il ne s'agit pas non plus d'une question de courant.
Dans nos examens de production, le résultat est généralement déterminé par une combinaison de facteurs :
- choix du matériau du segment
- correspondance de la qualité des brosses
- cohérence de l'état de surface
- contrôle du faux-rond
- densité de courant
- force du ressort
- réalité du cycle de travail
- Stratégie PWM dans le système complet
Ce dernier point est souvent ignoré trop longtemps.
Un collecteur décent peut vieillir très mal dans un environnement électrique inapproprié. Un collecteur bien adapté peut fonctionner beaucoup plus proprement que prévu.
Erreur 4 : Utiliser une BLDC sans capteur lorsque l'application ne le permet pas
La commutation électronique sans capteur peut très bien fonctionner dans la fenêtre de vitesse correcte. Mais un démarrage à faible vitesse, une charge instable, des inversions répétées ou des perturbations importantes peuvent rapidement révéler ses limites.
Si l'application doit démarrer fort et proprement, la méthode de contrôle a beaucoup d'importance. Les acheteurs comparent souvent les types de moteurs en ignorant ce détail. Puis, plus tard, le moteur est accusé d'être à l'origine d'une décision de commande.
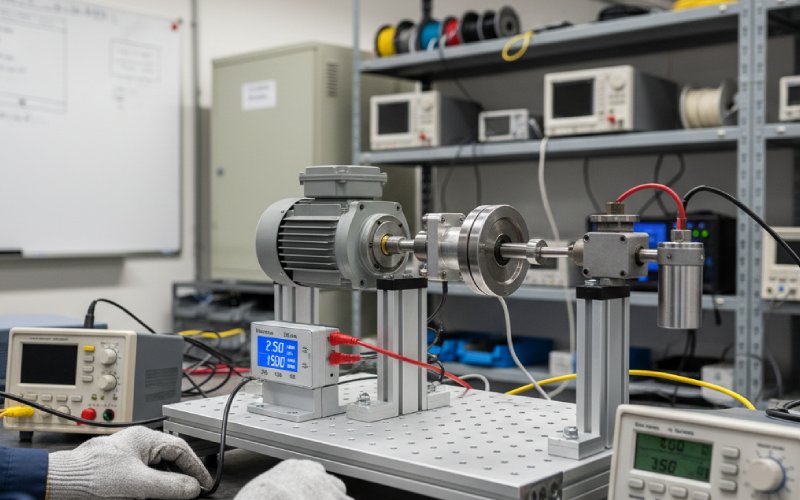
Ce que nous regardons en premier dans les projets de commutateurs
Lorsqu'un client nous envoie une nouvelle demande, nous ne commençons pas par le langage du catalogue.
Nous commençons généralement par cinq éléments :
- Conditions de départ
Le moteur démarre-t-il à vide, légèrement chargé ou contre une résistance réelle ? - Coefficient d'utilisation
Fonctionnement intermittent, cycle court répété ou fonctionnement continu ? - Vitesse de fonctionnement
La vitesse modérée avec accès au service est un monde. Le fonctionnement scellé à grande vitesse en est un autre. - Réalité du contrôleur
Le client est-il réellement préparé à une conduite plus évoluée, ou la conception essaie-t-elle encore de rester simple sur le plan électrique ? - Attentes en matière de service
Une maintenance périodique est-elle acceptable ? Ou bien le produit doit-il fonctionner longtemps avec un minimum d'entretien ?
La plupart des erreurs de sélection apparaissent à ce stade.
Pas plus tard dans la fiche technique. Juste là.
Comment nous améliorons les performances des collecteurs mécaniques en production
Lorsque des clients nous demandent d'améliorer la durée de vie du collecteur ou de réduire les problèmes de commutation d'un moteur à balais, nous ne répondons pas par une déclaration générale du type “optimisez la conception”. Cela n'aide personne.
Nous travaillons sur le problème à travers les détails de la production :
Stabilité de la voie de brossage
Si le chemin de contact est instable, l'ensemble du modèle d'usure le devient également. La consistance de la surface, la concentricité et la qualité de la transition des segments sont plus importantes que ne le pensent de nombreux acheteurs.
Couplage de matériaux
Le matériau du collecteur et la qualité des balais doivent être adaptés au profil réel du courant, et non au profil idéal. Une mauvaise adaptation peut fonctionner de manière acceptable lors d'un court essai au banc, mais se dégrader beaucoup plus rapidement sur le terrain.
Géométrie du segment
Le nombre de segments, la disposition de l'isolation, l'état des bords et la précision mécanique ont tous une incidence sur la qualité de la commutation. Sur les programmes à forte demande, les petites erreurs géométriques se manifestent par du bruit, un échauffement local ou une usure irrégulière.
Densité de courant et réalité de la surcharge
Certains clients spécifient des conditions nominales et opèrent ensuite en fonction des pics de surcharge. Cet écart est important. Nous examinons le schéma de courant à un stade précoce, car les dommages au collecteur sont souvent cumulatifs avant d'être visibles.
Répétabilité de la fabrication
Un bon échantillon n'est pas l'objectif à atteindre. C'est la cohérence des lots qui est visée. Pour les équipementiers, la vraie question est de savoir si le comportement du collecteur reste contrôlé pendant la production en série.
C'est là que l'expérience de l'usine compte plus que les belles paroles.
Quelle option choisir ?
Voici la réponse courte que nous utilisons actuellement.
Choisissez un moteur à collecteur mécanique à balais quand vous en avez besoin :
- architecture simple en courant continu
- démarrage direct
- coût de l'électronique contrôlée
- vitesse modérée
- pièces d'usure utilisables
- entretien pratique du terrain
- des performances solides dans les systèmes à fonctionnement intermittent
Choisir un moteur sans balai à commutation électronique ou moteur BLDC quand vous en avez besoin :
- longue durée d'utilisation continue
- réduction de l'entretien de routine
- un meilleur contrôle de la vitesse
- vitesse de fonctionnement plus élevée
- chemin thermique amélioré
- une intégration plus étroite avec une logique d'entraînement avancée
- réduction de la dépendance à l'égard des services liés à la brosse
Si la demande se situe entre les deux, la décision se résume généralement à une chose :
Préférez-vous gérer l'usure ou la complexité du contrôle ?
C'est une façon brutale de le dire. Elle n'en est pas moins utile.
Commutateur mécanique ou électronique pour les acheteurs OEM
Pour les acheteurs OEM et industriels, le choix ne doit pas se limiter à la question “quel est le meilleur moteur”.”
Une meilleure question se pose :
Quelle méthode de commutation facilite la construction, la validation, l'expédition, la maintenance et l'explication de l'ensemble du produit ?
C'est la vue d'usine.
Si votre équipe s'appuie sur une discipline en matière de coûts, un service direct et une architecture de moteur à balais éprouvée, un bon collecteur mécanique est encore très présent dans la conception des moteurs à courant continu modernes.
Si votre équipe se concentre sur un fonctionnement nécessitant peu d'entretien, un contrôle plus strict et des exigences de service plus élevées, la commutation électronique prend généralement la tête.
Les deux peuvent être corrects.
L'erreur consiste à choisir la bonne famille de moteurs pour la mauvaise logique de fonctionnement.
FAQ
Quelle est la différence entre un collecteur mécanique et une commutation électronique ?
Un collecteur mécanique commute le courant physiquement à l'intérieur d'un moteur à balais par l'intermédiaire de balais et de surfaces de cuivre segmentées. La commutation électronique commute le courant dans le contrôleur, généralement dans un moteur sans balais ou un moteur BLDC, à l'aide d'un retour de position ou d'une logique de commande.
Un moteur à balais est-il toujours moins cher qu'un moteur sans balais ?
Pas toujours en termes de coût total du projet, mais souvent plus simple au niveau du système. Un moteur à balais avec un collecteur mécanique peut réduire la complexité du contrôleur et raccourcir le développement dans de nombreuses applications industrielles. Un moteur sans balais peut réduire la maintenance ultérieure, mais la charge électronique est plus élevée.
Le moteur BLDC est-il toujours meilleur qu'un moteur à balais ?
Non. Le moteur BLDC est souvent mieux adapté au service continu, à une vitesse plus élevée, à une maintenance réduite et à un contrôle avancé. Un moteur à balais peut encore être le meilleur choix lorsque la simplicité de démarrage, le coût réduit du contrôleur et les pièces d'usure réparables sont plus importants.
Quand dois-je choisir un collecteur mécanique ?
Choisissez un collecteur mécanique lorsque l'application a une vitesse modérée, un accès à la maintenance réaliste, une architecture de contrôle sensible aux coûts et un cycle de travail qui ne sanctionne pas l'usure des balais de manière excessive.
La commutation électronique élimine-t-elle tous les problèmes de bruit du moteur ?
Non. Il élimine les bruits de contact des balais et les arcs électriques, mais une mauvaise stratégie de commutation, un contrôle de démarrage insuffisant ou des problèmes de synchronisation peuvent encore créer des vibrations, des bruits audibles et des ondulations de couple.
Est-il possible d'améliorer la durée de vie du collecteur sans modifier l'ensemble de la conception du moteur ?
Souvent oui. Dans de nombreux cas, l'amélioration de la durée de vie provient d'une meilleure adaptation des brosses, de la précision des segments, de la sélection des matériaux, du contrôle de la qualité de la surface et d'un examen plus honnête du cycle d'utilisation réel.
La BLDC sans capteur convient-elle à toutes les applications ?
Non. La commutation électronique sans capteur est généralement moins confortable à très basse vitesse, sous une charge de démarrage difficile, ou dans des applications avec des changements abrupts fréquents. Ces cas nécessitent souvent une commande par capteur ou une stratégie de moteur différente.
Besoin d'aide pour choisir la bonne méthode de commutation ?
Si vous comparez un commutateur mécanique, a moteur à balais, ou un Commutation électronique BLDC pour un nouveau projet OEM, envoyez-nous d'abord les données de travail:
- tension
- actuel
- plage de vitesse
- charge de démarrage
- cycle de travail
- matériau de la brosse s'il est déjà défini
- objectif de durée de vie
- limite d'espace
Notre équipe d'ingénieurs peut examiner l'application et suggérer une structure de collecteur ou un réglage côté moteur qui convient à la production en volume, et pas seulement aux essais en laboratoire.